台州酷可得教育科技有限公司 乐高|机器人编程|C 信奥赛课程|少儿编程
13736688030

2024-11-10 02:09:58
工业机器人离线编程的基本操作步骤包括:1. 机器人建模与配置:在离线编程软件中创建机器人模型,并进行必要的参数配置,包括机器人的几何结构、运动学参数、工具和工件信息等。2. 路径规划和碰撞检测:离线编程软件可以根据机器人建模信息,进行路径规划和碰撞检测,以确保机器人在执行任务时能够避开障碍物,并保持运动的安全性和稳定性。3. 程序验证和调试:在离线编程软件中进行程序验证和调试,通过仿真和模拟技术,对机器人的运动轨迹、动作序列和工作效果进行预测和评估,以确保程序的正确性和可靠性。跨学科融合:机器人编程结合生物学、心理学等领域,拓宽应用边界。台州常见机器人编程学习时间

工业机器人自主编程的基本操作步骤如下:1. 传感器数据获取:通过传感器收集环境信息和工件特征等数据,以供机器人进行决策和运动控制。2. 运动规划:根据任务规划和目标设定,使用机器人编程语言或软件工具进行运动规划。这包括路径规划、速度控制、碰撞检测等。3. 动作序列编写:根据运动规划,编写机器人的动作序列,包括起始位置、目标位置、动作方式、速度、加速度等参数。4. 控制算法设计:为了实现机器人的自主决策和运动控制,需要设计合适的控制算法。这可以包括PID控制、模糊控制、路径规划算法等。台州机器人编程价格机器人编程可以通过自动化和智能化来提高生产效率和质量。

离线编程,与在线编程同理,我们先了解下离线编程与在线编程有什么不同。支线任务一:工业机器人领域,离线编程与在线编程有什么不同?工业机器人领域中,离线编程和在线编程有一些不同之处。以下是它们的区别:离线编程:需要机器人系统和工作环境的图形模型。编程时不影响机器人实际工作。可以在计算机上进行轨迹规划和程序测试,提高编程精确性和效率。适用于复杂的任务和多样化的工作环境。在线编程:需要实际的机器人系统和工作环境。
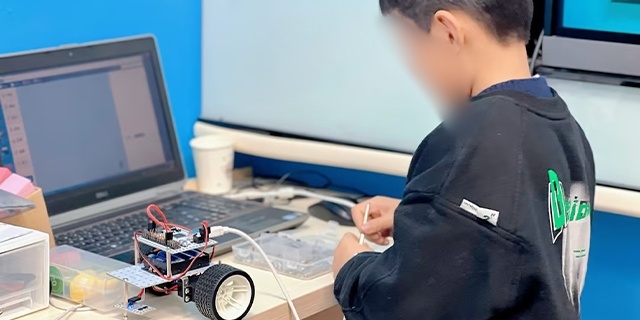
玩机器人的的孩子,会体现出很多平时家长觉得他们完全不具备的特质。在国外甚至有比较特别的例子,有学习障碍或无法专注学业的孩子们,在玩机器人时反而特别能够融入其中、产生完全浸入式的学习效果——由此可见机器人的吸引力。除此之外,玩机器人还需要环境的刺激或氛围,孩子自己单独学习与和小伙伴共同学习、完成任务的感受是截然不同的。可能有的孩子不善交流、沟通,那么玩机器人可以帮他们产生主动与小伙伴合作、交流的动机,更多人一起学习,也有利于互相促进、营造出理想的学习氛围。编程可以让机器人具备更精确和高效的执行能力。

工业机器人自主编程之所以没有普遍应用主要有以下一些因素:1. 复杂的任务规划和动作编写:工业机器人的任务规划和动作编写需要对机器人的运动轨迹、动作序列和控制参数进行准确且精细的规划和编写。这需要编程人员具备深厚的技术能力和经验,并花费大量的时间和精力。2. 环境感知和决策能力的挑战:工业机器人自主编程面临着环境感知和决策能力的挑战。要实现工业机器人在复杂的工作环境中自主运行和适应不同的工作任务,需要机器人具备高度的环境感知和决策能力,这是一个相对困难的技术问题。因此,工业机器人自主编程在普遍应用方面还存在一些难点,包括缺乏统一标准和规范、缺乏专业人才、复杂的任务规划和动作编写,以及环境感知和决策能力的挑战。随着技术的发展和应用的推广,这些难点逐渐得到解决,工业机器人自主编程有望在未来得到更普遍的应用。机器人编程是未来科技发展的重要方向,将为人类创造更多的机遇和挑战。台州机器人编程价格
编程让机器人具备自主学习能力:不断进步,适应各种环境。台州常见机器人编程学习时间
离线编程:需要机器人系统和工作环境的图形模型。编程时不影响机器人实际工作。离线编程的优点是可以在计算机上进行机器人编程,不需要实际的机器人系统和工作环境,对于复杂的任务和多样化的工作环境比较适用。离线编程可以在仿真环境中进行轨迹规划和程序测试,提高了编程的精确性和效率。然而,离线编程需要机器人系统和工作环境的图形模型,对于一些特殊情况可能无法准确地模拟。综上所述,示教编程适用于简单的任务和单一的工作环境,但需要编程者具备一定的经验和技能;离线编程适用于复杂的任务和多样化的工作环境,可以提高编程的精确性和效率。选择哪种编程方式取决于具体的需求和实际情况。由于工业机器人各种机器人机型不一,这里笔者就不再展示。想要了解编程指令的读者,可以自行查阅对应机型官网相关信息。台州常见机器人编程学习时间